|
关于Basler工业相机的资料非常的少,为了能把Basler相机使用起来,耗费了很多时间,现在终于能在Linux(Ubuntu)系统中调用Basler相机了。下面把详细的过程记录下来。其实Linux下配置Basler摄像头时和配置OpenCV时相差不大。
1、下载对应安装包及解压 先去官网下载对应的安装包,在这里。
根据自己的系统选择x86或者x86_64(即x64)版本。我的相机型号为acA1920-40gc。 下载好后,对压缩包进行解压操作,可以选择解压文件到自己选择的目录,此处我们选择默认当前目录: $ tar -xzvf pylon-5.0.***.tar.gz 解压文件后,打开文件,里边还有一个压缩包,此压缩包即为安装文件,解压此文件到/opt目录下: $ sudo tar -C /opt -xzvf pylon***armhf.tar.gz 安装完毕后就开始在qtcreator中进行配置,以便在Qtcreator中调用该相机。
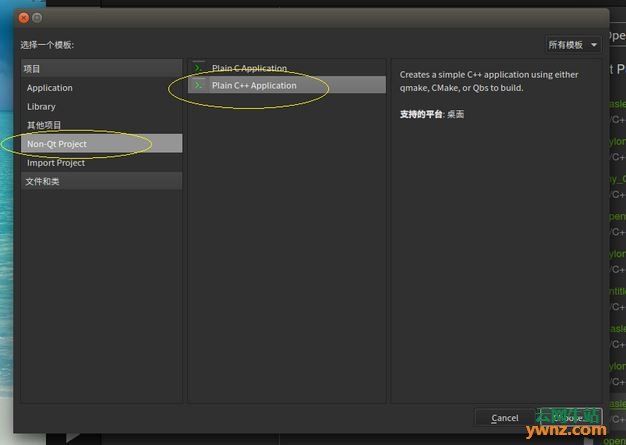
2、首先打开Qtcreator,如下图所示,创建空项目
3、然后打开.pro文件,在其中配置Basler相机
先找到INCLUDEPATH的路径: (1)点开“计算机”,点开文件夹“opt”
(2)接着打开pylon5文件夹
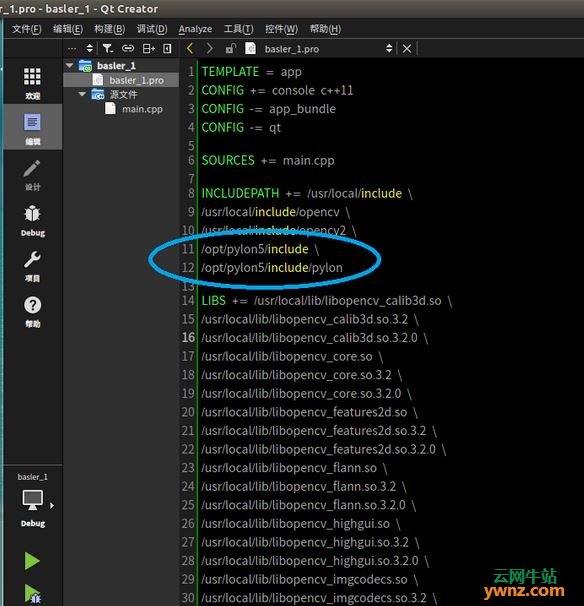
那么INCLUDEPATH 的写法为: INCLUDEPATH += /opt/pylon5/include \ /opt/pylon5/include/pylon 例子:(下图中我是把OpenCV和Basler一起配置)
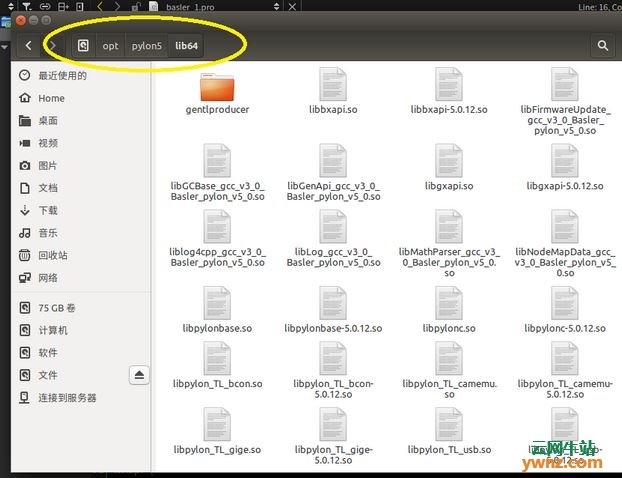
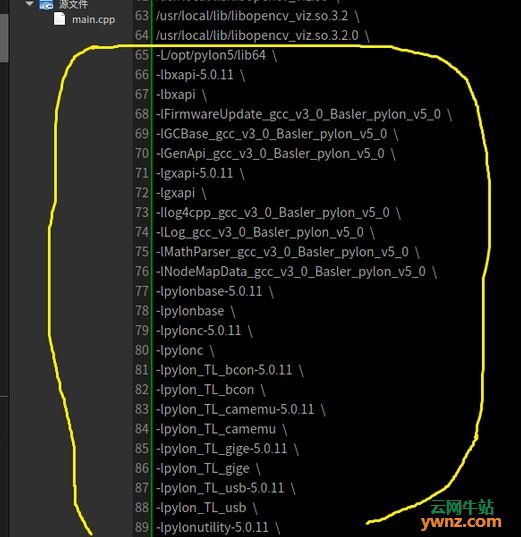
4、写好了INCLUDEPATH,再来写LIBS LIBS(我目前知道的)有2种写法: 第一种是直接写出路径来: 例子: LIBS += /usr/local/lib/libopencv_calib3d.so \ /usr/local/lib/libopencv_calib3d.so.3.2 \ /usr/local/lib/libopencv_calib3d.so.3.2.0 \ /usr/local/lib/libopencv_core.so \ 第二种方法是先写一个总的,再写分的: 例子: LIBS +=-L/opt/pylon5/lib64 \ -lbxapi-5.0.11 \ -lbxapi \ -lFirmwareUpdate_gcc_v3_0_Basler_pylon_v5_0 \ -lGCBase_gcc_v3_0_Basler_pylon_v5_0 \ -lGenApi_gcc_v3_0_Basler_pylon_v5_0 \ -lgxapi-5.0.11 \ 这2种写法都是一样的,是通用的。 先找到LIB所在的路径为 opt / pylon5 / lib64
可以看到里面有很多后缀为.so的文件,把这些文件的路径写到.pro文件中就行了。
这里我把我总的.pro文件内容贴出来,可供参考:(我这里面同时配置了OpenCV和Basler,注意我的Basler的版本为5.0.11) TEMPLATE = app CONFIG += console c++11 CONFIG -= app_bundle CONFIG -= qt SOURCES += main.cpp INCLUDEPATH += /usr/local/include \ /usr/local/include/opencv \ /usr/local/include/opencv2 \ /opt/pylon5/include \ /opt/pylon5/include/pylon LIBS += /usr/local/lib/libopencv_calib3d.so \ /usr/local/lib/libopencv_calib3d.so.3.2 \ /usr/local/lib/libopencv_calib3d.so.3.2.0 \ /usr/local/lib/libopencv_core.so \ /usr/local/lib/libopencv_core.so.3.2 \ /usr/local/lib/libopencv_core.so.3.2.0 \ /usr/local/lib/libopencv_features2d.so \ /usr/local/lib/libopencv_features2d.so.3.2 \ /usr/local/lib/libopencv_features2d.so.3.2.0 \ /usr/local/lib/libopencv_flann.so \ /usr/local/lib/libopencv_flann.so.3.2 \ /usr/local/lib/libopencv_flann.so.3.2.0 \ /usr/local/lib/libopencv_highgui.so \ /usr/local/lib/libopencv_highgui.so.3.2 \ /usr/local/lib/libopencv_highgui.so.3.2.0 \ /usr/local/lib/libopencv_imgcodecs.so \ /usr/local/lib/libopencv_imgcodecs.so.3.2 \ /usr/local/lib/libopencv_imgcodecs.so.3.2.0 \ /usr/local/lib/libopencv_imgproc.so \ /usr/local/lib/libopencv_imgproc.so.3.2 \ /usr/local/lib/libopencv_imgproc.so.3.2.0 \ /usr/local/lib/libopencv_ml.so \ /usr/local/lib/libopencv_ml.so.3.2 \ /usr/local/lib/libopencv_ml.so.3.2.0 \ /usr/local/lib/libopencv_objdetect.so \ /usr/local/lib/libopencv_objdetect.so.3.2 \ /usr/local/lib/libopencv_objdetect.so.3.2.0 \ /usr/local/lib/libopencv_photo.so \ /usr/local/lib/libopencv_photo.so.3.2 \ /usr/local/lib/libopencv_photo.so.3.2.0 \ /usr/local/lib/libopencv_shape.so \ /usr/local/lib/libopencv_shape.so.3.2 \ /usr/local/lib/libopencv_shape.so.3.2.0 \ /usr/local/lib/libopencv_stitching.so \ /usr/local/lib/libopencv_stitching.so.3.2 \ /usr/local/lib/libopencv_stitching.so.3.2.0 \ /usr/local/lib/libopencv_superres.so \ /usr/local/lib/libopencv_superres.so.3.2 \ /usr/local/lib/libopencv_superres.so.3.2.0 \ /usr/local/lib/libopencv_video.so \ /usr/local/lib/libopencv_video.so.3.2 \ /usr/local/lib/libopencv_video.so.3.2.0 \ /usr/local/lib/libopencv_videoio.so \ /usr/local/lib/libopencv_videoio.so.3.2 \ /usr/local/lib/libopencv_videoio.so.3.2.0 \ /usr/local/lib/libopencv_videostab.so \ /usr/local/lib/libopencv_videostab.so.3.2 \ /usr/local/lib/libopencv_videostab.so.3.2.0 \ /usr/local/lib/libopencv_viz.so \ /usr/local/lib/libopencv_viz.so.3.2 \ /usr/local/lib/libopencv_viz.so.3.2.0 \ -L/opt/pylon5/lib64 \ -lbxapi-5.0.11 \ -lbxapi \ -lFirmwareUpdate_gcc_v3_0_Basler_pylon_v5_0 \ -lGCBase_gcc_v3_0_Basler_pylon_v5_0 \ -lGenApi_gcc_v3_0_Basler_pylon_v5_0 \ -lgxapi-5.0.11 \ -lgxapi \ -llog4cpp_gcc_v3_0_Basler_pylon_v5_0 \ -lLog_gcc_v3_0_Basler_pylon_v5_0 \ -lMathParser_gcc_v3_0_Basler_pylon_v5_0 \ -lNodeMapData_gcc_v3_0_Basler_pylon_v5_0 \ -lpylonbase-5.0.11 \ -lpylonbase \ -lpylonc-5.0.11 \ -lpylonc \ -lpylon_TL_bcon-5.0.11 \ -lpylon_TL_bcon \ -lpylon_TL_camemu-5.0.11 \ -lpylon_TL_camemu \ -lpylon_TL_gige-5.0.11 \ -lpylon_TL_gige \ -lpylon_TL_usb-5.0.11 \ -lpylon_TL_usb \ -lpylonutility-5.0.11 \ -lpylonutility \ -luxapi-5.0.11 \ -luxapi \ -lXmlParser_gcc_v3_0_Basler_pylon_v5_0 \
5、这样配置好了.pro文件,就能开始写程序了 在Linux中调用Basler摄像头,需要一段比较长的代码,代码如下: //定义是否保存图片 #define saveImages 0 //定义是否记录视频 #define recordVideo 0 // 加载OpenCV API #include <opencv2/core/core.hpp> #include <opencv2/highgui/highgui.hpp> #include <opencv2/video/video.hpp> #include<opencv2/opencv.hpp> //加载PYLON API. #include <pylon/PylonIncludes.h> #include <pylon/gige/BaslerGigEInstantCamera.h> //自动调节 //加载C++ 头文件 #include<iostream> //命名空间. using namespace Pylon; using namespace cv; using namespace std; using namespace Basler_GigECameraParams; //自动调节 typedef Pylon::CBaslerGigEInstantCamera Camera_t; //自动调节 typedef Camera_t::GrabResultPtr_t GrabResultPtr_t; //自动调节 static const uint32_t c_countOfImagesToGrab = 2000; int saveImage_flag=0; //保存一张图片 int main() { cout<<"000"<<endl; //Pylon自动初始化和终止 Pylon::PylonAutoInitTerm autoInitTerm; try { cout<<"0"<<endl; // 原程序对camera的定义 //CInstantCamera camera(CTlFactory::GetInstance().CreateFirstDevice()); CDeviceInfo info; info.SetDeviceClass( Camera_t::DeviceClass()); // Create an instant camera object with the first found camera device that matches the specified device class. Camera_t camera( CTlFactory::GetInstance().CreateFirstDevice( info)); cout<<"1"<<endl; // 打印相机的名称 std::cout << "Using device " << camera.GetDeviceInfo().GetModelName() << endl; cout<<"2"<<endl; //获取相机节点映射以获得相机参数 GenApi::INodeMap& nodemap = camera.GetNodeMap(); cout<<"3"<<endl; //打开相机 camera.Open(); cout<<"4"<<endl; //获取相机成像宽度和高度 GenApi::CIntegerPtr width = nodemap.GetNode("Width"); GenApi::CIntegerPtr height = nodemap.GetNode("Height"); cout<<"5"<<endl; //设置相机最大缓冲区,默认为10 camera.MaxNumBuffer = 5; // 新建pylon ImageFormatConverter对象. CImageFormatConverter formatConverter; cout<<"6"<<endl; //确定输出像素格式 formatConverter.OutputPixelFormat = PixelType_BGR8packed; // 创建一个Pylonlmage后续将用来创建OpenCV images CPylonImage pylonImage; cout<<"7"<<endl; //声明一个整形变量用来计数抓取的图像,以及创建文件名索引 int grabbedlmages = 0; // 新建一个OpenCV video creator对象. VideoWriter cvVideoCreator; //新建一个OpenCV image对象. Mat openCvImage; // 视频文件名 cout<<"8"<<endl; std::string videoFileName = "openCvVideo.avi"; // 定义视频帧大小 cv::Size frameSize = Size((int)width->GetValue(), (int)height->GetValue()); cout<<"9"<<endl; cout<<"Width: "<<frameSize.width<<endl; cout<<"Height: "<<frameSize.height<<endl; //设置视频编码类型和帧率,有三种选择 // 帧率必须小于等于相机成像帧率!!!! cvVideoCreator.open(videoFileName, CV_FOURCC('D', 'I', 'V','X'), 10, frameSize, true); //cvVideoCreator.open(videoFileName, CV_F0URCC('M','P',,4','2’), 20, frameSize, true); //cvVideoCreator.open(videoFileName, CV_FOURCC('M', '3', 'P', 'G'), 20, frameSize, true); cout<<"10"<<endl; // 开始抓取c_countOfImagesToGrab images. //相机默认设置连续抓取模式 camera.StartGrabbing(-1, GrabStrategy_LatestImageOnly); //c_countOfImagesToGrab //抓取结果数据指针 CGrabResultPtr ptrGrabResult; // 当c_countOfImagesToGrab images获取恢复成功时,Camera.StopGrabbing() //被RetrieveResult()方法自动调用停止抓取 cout << "Initial Gain = " << camera.GainRaw.GetValue() << endl; cout << "Initial exposure time = "; cout << camera.ExposureTimeAbs.GetValue() << " us" << endl; cout << "Initial balance ratio: "; camera.BalanceRatioSelector.SetValue(BalanceRatioSelector_Red); cout << "R = " << camera.BalanceRatioAbs.GetValue() << " "; camera.BalanceRatioSelector.SetValue(BalanceRatioSelector_Green); cout << "G = " << camera.BalanceRatioAbs.GetValue() << " "; camera.BalanceRatioSelector.SetValue(BalanceRatioSelector_Blue); cout << "B = " << camera.BalanceRatioAbs.GetValue() << endl; while (camera.IsGrabbing()) { // 等待接收和恢复图像,超时时间设置为5000 ms. camera.RetrieveResult(5000, ptrGrabResult, TimeoutHandling_ThrowException); //如果图像抓取成功 if (ptrGrabResult->GrabSucceeded()) { // 获取图像数据 // cout <<"SizeX: "<<ptrGrabResult->GetWidth()<<endl; // cout <<"SizeY: "<<ptrGrabResult->GetHeight()<<endl; //将抓取的缓冲数据转化成pylon image. formatConverter.Convert(pylonImage, ptrGrabResult); // 将 pylon image转成OpenCV image. openCvImage = cv::Mat(ptrGrabResult->GetHeight(), ptrGrabResult->GetWidth(), CV_8UC3, (uint8_t *) pylonImage.GetBuffer()); //如果需要保存图片 if (saveImages) { std::ostringstream s; // 按索引定义文件名存储图片 s << "image_" << grabbedlmages << ".jpg"; std::string imageName(s.str()); //保存OpenCV image. imwrite(imageName, openCvImage); grabbedlmages++; } //如果需要记录视频 if (recordVideo) { cvVideoCreator.write(openCvImage); } //新建OpenCV display window. namedWindow("OpenCV Display Window", CV_WINDOW_NORMAL); // other options: CV_AUTOSIZE, CV_FREERATIO //显示及时影像. if(!openCvImage.data) { cout<<"opencvImage fail"<<endl; continue; } imshow("OpenCV Display Window", openCvImage); if(saveImage_flag==0) //只保存一张图片 { imwrite("/home/fsac/2.jpg",openCvImage); saveImage_flag=1; } // Define a timeout for customer's input in // '0' means indefinite, i.e. the next image will be displayed after closing the window. // '1' means live stream waitKey(10); } else { cout<<"图像读取失败,即ptrGrabResult->GrabSucceeded()未成功"<<endl; continue; } } if(!camera.IsGrabbing()) cout<<"camera.IsGrabbing() is failed"<<endl; } catch (GenICam::GenericException &e) { // Error handling. cerr << "An exception occurred." << endl << e.GetDescription() << endl; } return 0; }
相关主题 |