|
以下演示在 Ubuntu Linux 操作系统中安装 ROS 系统(ROS Kinetic Kame)的详细步骤,ROS Kinetic Kame 长期支持版,支持到2021年4月,让我们一起开启 ROS 机器人之旅。
条件 安装 Ubuntu Linux 操作系统,你可以参考超详细的Ubuntu 18.04安装图解教程。 注:可以在 Windows 环境下创建新的虚拟机(VMware Workstation)安装 Linux 操作系统 Ubuntu,然后在 Ubuntu 上安装 ROS 并进行测试。
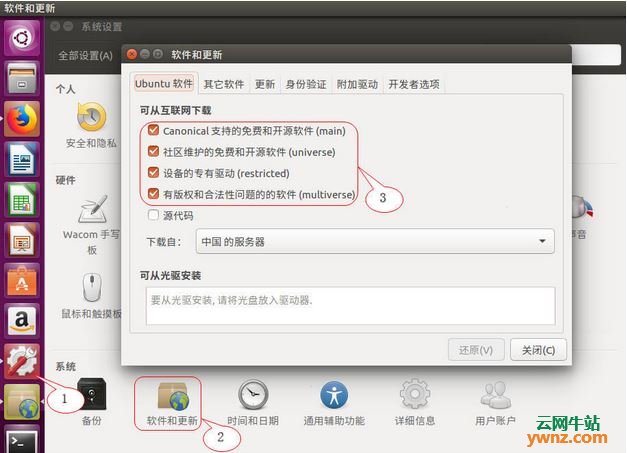
1、配置 Ubuntu 软件仓库 配置 Ubuntu 软件仓库(repositories) 以允许 "restricted"、"universe" 和 "multiverse"这三种安装模式。 一般情况下,该选项是默认的。单击“系统设置”→“软件和更新”,查看默认配置:
2、开启“终端”命令窗口 键盘快捷键“Ctrl+Alt+T”开启命令行,也可以右键单击“终端”按钮,选择“锁定到启动器”:
3、添加 sources.list 用于设置安装文件的下载来源,在 Ubuntu 终端输入,任选其一,建议选国内镜像网站,以提高下载速度。 (注:系统提示输入密码,输入 Ubuntu 系统密码,输入密码时,不会显示任何字符,然后按回车完成) (1)官网: sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' (2)国内镜像: 中国科技大学(推荐): sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list' 清华大学: sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list' 易科机器人实验室 EXBOT: sudo sh -c '. /etc/lsb-release && echo "deb http://ros.exbot.net/rospackage/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list' (3)新加坡镜像: sudo sh -c '. /etc/lsb-release && echo "deb http://mirror-ap.packages.ros.org/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
4、添加 keys sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
5、安装 ROS (1)首先,确保你的 Debian 软件包索引是最新的: sudo apt-get update (2)安装桌面完整版(推荐):包含 ROS、rqt、rviz、机器人通用库、2D/3D 模拟器、导航以及 2D/3D 感知: sudo apt-get install ros-kinetic-desktop-full
6、初始化 rosdep rosdep 可以方便在你需要编译某些源码的时候为其安装一些系统依赖,同时也是某些 ROS 核心功能组件所必需用到的工具: sudo rosdep init rosdep update
7、配置环境 以便每次打开一个新的终端时,ROS 环境变量都能够自动配置好: echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc source ~/.bashrc
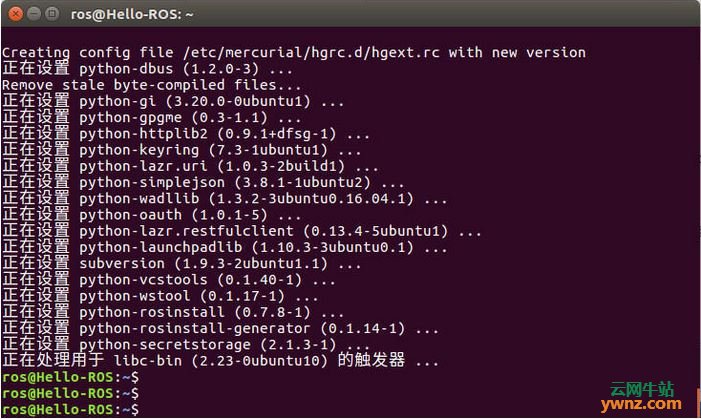
8、安装附带工具包 sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential 至此,完成 ROS 系统的安装与配置:
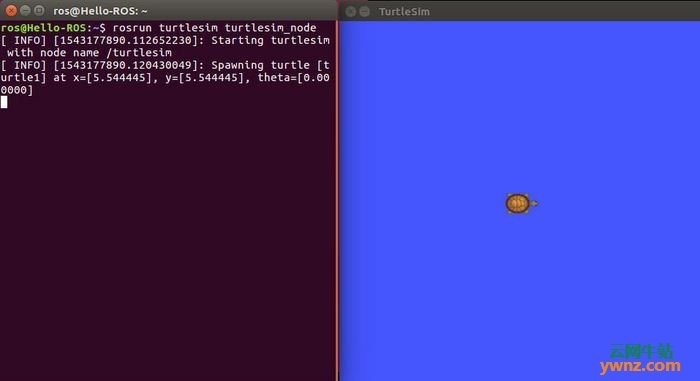
9、ROS 系统测试 下面测试一下 ROS 系统是否已经安装正确: 1].开启 roscore 开启一个新的终端窗口,运行 ROS 核心服务器 core service: roscore 2].测试小乌龟程序 (1)开启一个新的终端窗口,运行 “Turtlesim”: rosrun turtlesim turtlesim_node
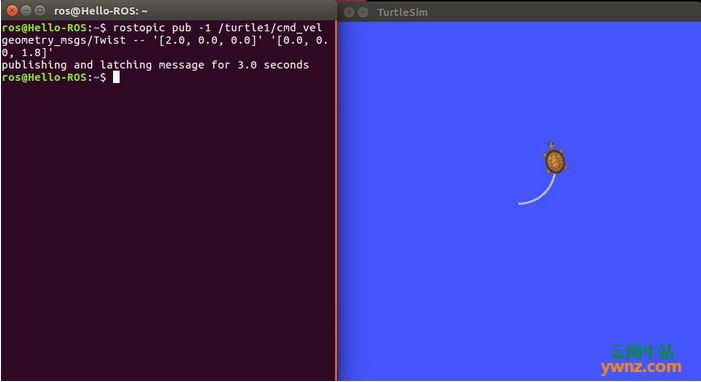
(2)发送一条消息给 turtlesim,告诉它以2.0大小的线速度和1.8大小的角速度开始转动: rostopicpub-1/turtle1/cmd_vel geometry_msgs/Twist --'[2.0, 0.0, 0.0]''[0.0, 0.0, 1.8]'
(3)rostopic pub -r 1 命令 一个稳定的频率为 1Hz 的命令,让乌龟绕圆圈转动: rostopicpub/turtle1/cmd_vel geometry_msgs/Twist -r1--'[2.0, 0.0, 0.0]''[0.0, 0.0, 1.8]'
(4)键盘控制小乌龟移动 开启一个新的终端窗口,运行键盘控制命令,用键盘 “↑ ↓ ← →”控制小乌龟方向: rosrun turtlesim turtle_teleop_key
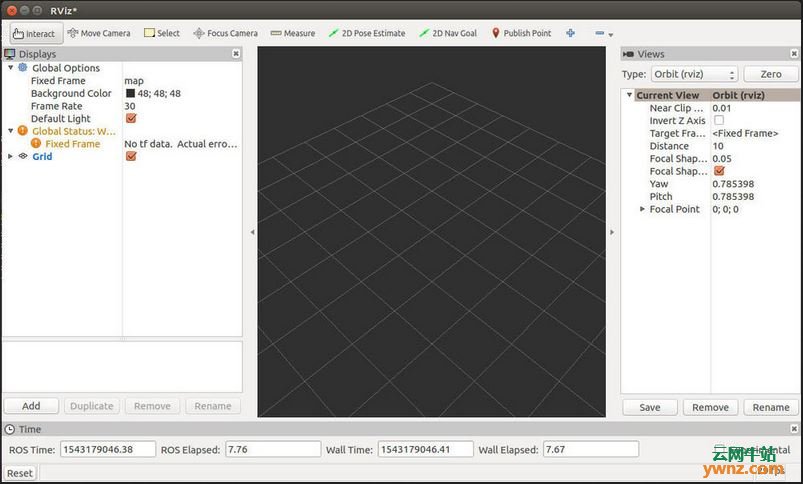
3].开启 RVIZ 开启一个新的终端窗口,运行指令: rviz
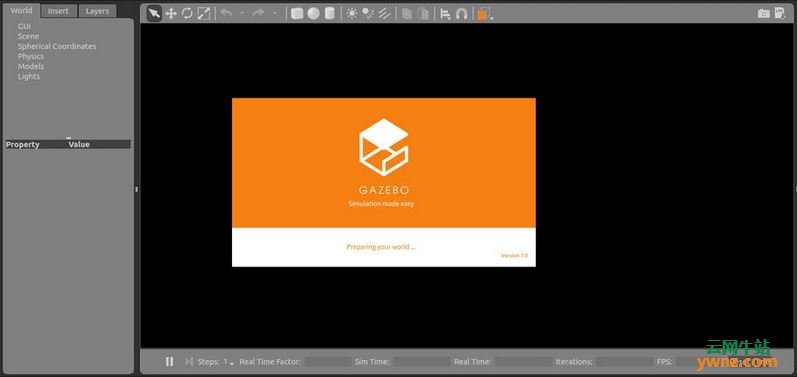
4].启动 Gazebo 开启一个新的终端窗口,运行指令: gazebo
至此,ROS 系统测试成功。可以在 Ubuntu Linux 操作系统中流畅运行 ROS 了。
相关主题 |